A
A
A
San serif
Serif
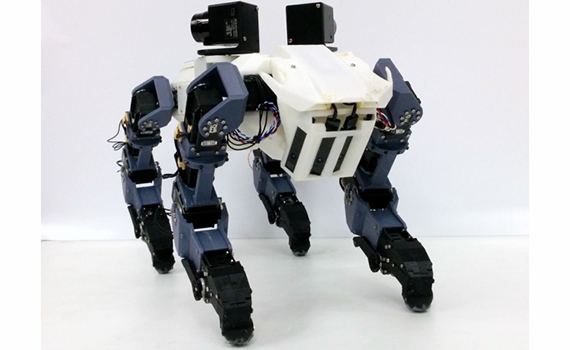
Японские инженеры создали четвероногого робота, способного ходить по горизонтальным поверхностям и взбираться по абсолютно вертикальным лестницам, причем он самостоятельно распознает поручни лестницы перед собой.
Разработка была представлена на конференции “IROS 2019”, в Китае несколько дней назад.
Ходячие роботы стали популярны среди исследователей благодаря их способности преодолевать препятствия на местности, а также тому, что их элементы и алгоритмы получили сильное развитие в последние годы.
По сообщению nplus1.ru, Наоюки Кубота (Naoyuki Kubota) из Токийского столичного университета и его коллеги оснастили четвероногого робота простыми захватами, не мешающими ему при ходьбе, но позволяющими взбираться вверх по вертикальным лестницам и продолжать путь наверху. Робот имеет достаточно сложную конструкцию ног с пятью степенями свободы в каждой. На конце ноги располагаются датчики силы и касания, а также защелка, позволяющая захватывать поручень на лестнице.
Для навигации у робота установлено два лазерных дальномера на спине и четыре времяпролетных камер на голове. Оба типа датчиков напрямую измеряют расстояние, посылая лучи, и измеряя время, через которое отраженные лучи возвращаются к ним. Данные с разных датчиков объединяются в единое облако точек, а алгоритмы машинного обучения самостоятельно распознают поручни лестницы и рассчитывают оптимальные точки захвата.
© Все права защищены. При использовании информации гиперссылка на сайт www.iсt.az обязательна.





