A
A
A
San serif
Serif
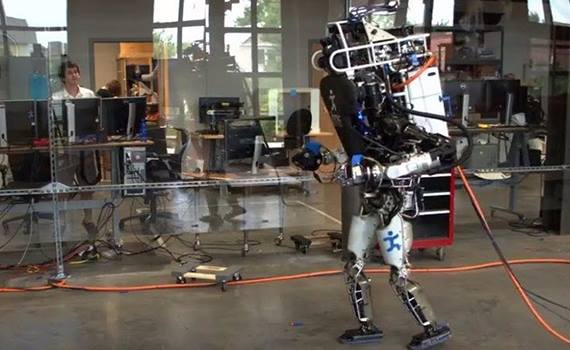
Специалисты Флоридского института человеческого и машинного познания (IHMC) научили робота Atlas от Boston Dynamics человеческой походке.
Изначально человекоподобный робот передвигался по разным поверхностям, согнув ноги в коленях. Разработчики решили сделать так, чтобы походка у Atlas стала больше похожа на человеческую.
Специалисты разработали новый алгоритм управления телом для Atlas. Он смог передвигаться по ровной поверхности, выпрямляя ноги в области коленей.
В ходе реальных испытаний Atlas стоял в вертикальном положении с выпрямленными ногами, человек слегка толкал его со спины. Пытаясь удержать равновесие, человекоподобное роботизированное устройство выставляло вперед одну из ног, не сгибая ее в области колена. Вторая нога при этом немного сгибалась. Установив равновесие, он выравнивал эту конечность и затем возвращался в исходное положение.
Когда робот шел по ровному полу, человек слегка толкал его сбоку. Atlas смещал правую ногу в сторону. При этом конечности оставались максимально выпрямленными. Затем робот продолжал идти вперед.
При ходьбе по неровно уложенным бетонным блокам Atlas также смог ходить, выпрямляя ноги в области колен. Он сгибал нижние конечности при поднятии на первый блок и при спуске с этого препятствия.





