A
A
A
San serif
Serif
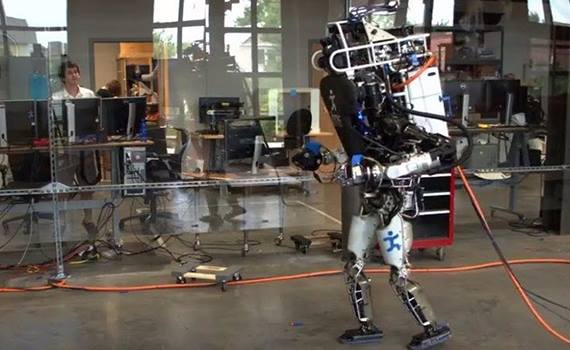
Specialists at the Florida Institute of Human and Computer Science (IHMC) taught the Atlas robot from Boston Dynamics human gait.
Initially, the humanoid robot moved on different surfaces, bending the legs at the knees. The developers decided to make the Atlas walk more like a human.
Experts have developed a new body control algorithm for Atlas. He was able to move on a flat surface, straightening his legs at the knees.
During real tests, Atlas stood upright with his legs straightened, the man pushed him slightly from behind. Trying to keep the balance, the humanoid robotic device was pushing one of the legs forward without bending it in the knee area. The second leg at the same time a little bent. Having established balance, he leveled this limb and then returned to its original position.
When the robot was walking on a flat floor, the man pushed him slightly at the side. Atlas shifted his right leg to the side. At the same time, the limbs remained as straight as possible. Then the robot kept going forward.
When walking on unevenly laid concrete blocks, Atlas was also able to walk, straightening his legs in the knee area. He was bending his lower limbs while lifting to the first block and when descending from this obstacle.




.jpg)