A
A
A
San serif
Serif
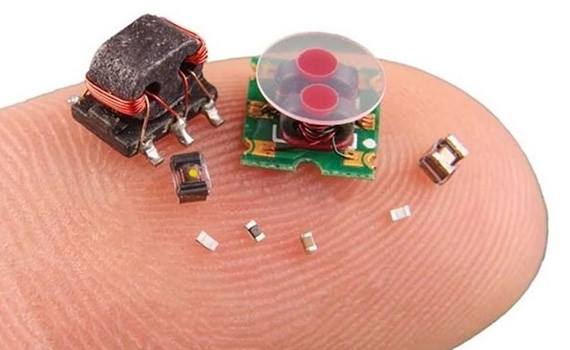
Recently, the Defense Advanced Department Research Projects Agency (DARPA) has developed a short range independent micro-robotic platform SHRIMP program that will develop micro level robotic programs to analyses the effects brought by natural calamities. IEEE Spectrum initiated the essence of creating an “insect-scale robots” program mainly for disaster recovery. Though DARPA will be facing difficulty for creating extremely constrained (SWaP – size, weight, and power) microrobotics.
DARPA is deliberate to get the exact devices for search and recuse mission, although huge robots can perform outstandingly in a large area, but group of insect robots that can work more efficiently through tiny cracks or cranny. Military is more efficient with large number of small robots covering maximum amount of area, said Evan Ackerman, a senior writer at IEEE Spectrum. He also specified his concerns related to robots size, weight, and power, as there are high chances of power run out.
The micro robots will face many challenges and competition in coming years. As the microrobots, depend on tethers for control, power, and processing with limited storage and restricted by actuation technology for energy efficiency. Thus, various efforts are being made to use micro to milli robots by making compact power storage and converters by using high voltage actuation mechanism. Thus, the market may see completion based on power sources and actuators or in a form of complete robots. Additionally, competition events will also include shotput, weightlifting an object, and distance through jumps. The use of short range independent micro-robotic platform SHRIMP is expected to gain huge attention and growth in coming time, whereas it will be useful in numerous fields until technical challenges from optical steering to prosthetics are met.




.jpg)