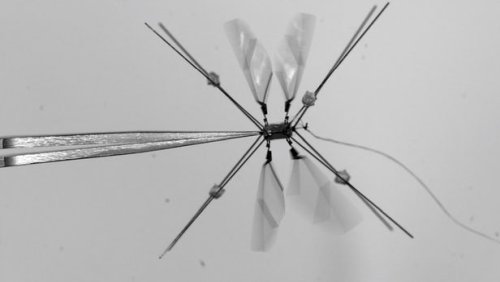
Bee + - Four-winged version of the flying RoboBee microrobot
29.05.2019 15:30 / Interesting information
Currently, the creation of tiny robots, in size and design resembling insects, while it seems quite expensive entertainment. But the potential of such cybernetic "insects" is huge, they can be used in rescue missions and providing assistance to victims, in agriculture, environmental monitoring and in many other areas. However, the creation of such robots and their main components - power sources, control electronics, sensors, motors, etc., causes a number of difficulties associated with the microscopic scale of these components. And even if these difficulties can be solved in one way or another, other problems arise related to the stability of movement or flight of such tiny devices.
At one time, we talked about the RoboBee flying microrobot, developed by specialists from Harvard University. Despite the long and hard work of robotics specialists, this robot never achieved the required stability during the flight. A solution to this problem was recently proposed by researchers from the University of Southern California (USC), and this solution was embodied in the design of the new microrobot Bee +, which has not two, as its predecessor, but four winged wings.
Note that the maneuverability of the RoboBee robot is strongly limited to one pair of its wings, which are driven by tiny piezoelectric motors weighing 25 mg each. No matter how hard the experts from Harvard tried, they managed to provide only control of roll, pitch and lift, and another important component of flight control, rotation, remained beyond the limits of the two-wing design.
In their studies, specialists from USC noticed that rotation control during the flight is quite easily implemented by adding another pair of wing wings to the design of the RoboBee robot, as in some insects. However, the weight of the engines with such a scheme began to be 50 mg and the original RoboBee robot, equipped with an additional pair of wings, became too heavy and simply could not rise into the air.
27 MART - AZƏRBAYCANDA ELM GÜNÜDÜR
Services
Inquire your business presence with us!
Read more Trust our creativity and unique ideas!
Read more Quality and colorful publish for affordable prices!
Read more Rich e-Library services!
Read more NƏŞRİYYATI
SCIENTIFIC JOURNALS


İNFORMATİKA TERMİNLƏRİNİN
İZAHLI LÜĞƏTİ
İZAHLI LÜĞƏTİ